
主營:機器人吸塑切割,機器人系統(tǒng)集成 ,機器人吸塑切割系統(tǒng)

普通會員
|
品 牌- |
成 色- |
供貨類型新品 |
規(guī)格型號- |
廠 家- |
認(rèn) 證- |
產(chǎn) 地- |
包裝規(guī)格- |
瀏覽數(shù)量258 |
特性描述- |
過期時間長期有效 |
有效期至長期有效 |
應(yīng)用領(lǐng)域 |
- |
焊接機器人按結(jié)構(gòu)坐標(biāo)系來分
1) 直角坐標(biāo)型 這類機器人的結(jié)構(gòu)和控制方案與機床類似,其到達空間位置的三個運動(x、y、z)是由直線運動構(gòu)成,焊接機器人,這種形式的機器人優(yōu)點是運動學(xué)模型簡單,各軸線位移分辨率在操作容積內(nèi)任一點上均為恒定,控制精度容易提高;缺點是機構(gòu)龐大,激光焊接機器人,工作空間小,操作靈活性較差。簡易和焊接機器人常采用這種形式。2) 圓柱坐標(biāo)型 這類機器人在基座水平轉(zhuǎn)臺上裝有立柱,水平臂可沿立柱作上下運動并可在水平方向伸縮。這種結(jié)構(gòu)方案的優(yōu)點是末端操作可獲得較高速度,缺點是末端操作器外伸離開立柱軸心愈遠,自動焊接機器人,其線位移分辨精度愈低。3) 球坐標(biāo)型 與圓柱坐標(biāo)結(jié)構(gòu)相比較,這種結(jié)構(gòu)形式更為靈活。但采用同一分辨率的碼盤檢測角位移時,伸縮關(guān)節(jié)的線位移分辨率恒定,但轉(zhuǎn)動關(guān)節(jié)反映在末端操作器上的線位移分辨率則是個變量,增加了控制系統(tǒng)的復(fù)雜性。4) 全關(guān)節(jié)型 全關(guān)節(jié)型機器人的結(jié)構(gòu)類似人的腰部和手部,其位置和姿態(tài)全部由旋轉(zhuǎn)運動實現(xiàn),其優(yōu)點是機構(gòu)緊湊,靈活性好,占地面積小,工作空間大,全自動焊接機器人,可獲得較高的末端操作器線速度;其缺點是運動學(xué)模型復(fù)雜,高的精度控制難度大,空間線位移分辨率取決于機器人手臂的位姿。
弧焊機器人除前面提及的在作“之”字形拐角焊或小直徑圓焊縫焊接時,其軌跡應(yīng)能貼近示教的軌跡之外,還應(yīng)具備不同擺動樣式的軟件功能,供編程時選用,以便作擺動焊,而且擺動在每一周期中的停頓點處,機器人也應(yīng)自動停止向前運動,以滿足工藝要求。此外,還應(yīng)有接觸尋位、自動尋找焊縫起點位置、電弧跟蹤及自動再引弧功能等。
點焊機器人的焊接裝備,由于采用了一體化焊鉗,焊接變壓器裝在焊鉗后面,所以變壓器必須盡量小型化。對于容量較小的變壓器可以用50Hz工頻交流,而對于容量較大的變壓器,已經(jīng)開始采用逆變技術(shù)把50Hz工頻交流變?yōu)?00~700Hz交流,使變壓器的體積減少、減輕。變壓后可以直接用600~700Hz交流電焊接,也可以再進行二次整流,用直流電焊接。焊接參數(shù)由定時器調(diào)節(jié)。新型定時器已經(jīng)微機化,因此機器人控制柜可以直接控制定時器,無需另配接口。點焊機器人的焊鉗,通常用氣動的焊鉗,氣動焊鉗兩個電極之間的開口度一般只有兩級沖程。而且電極壓力一旦調(diào)定后是不能隨意變化的。
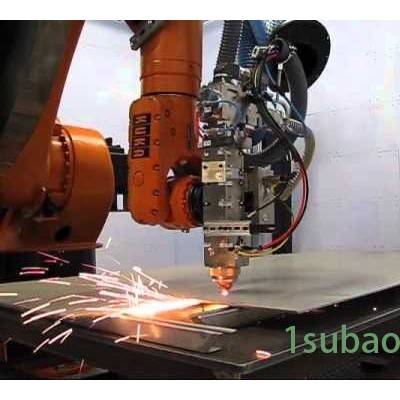
全自動焊接機器人-焊接機器人- 常州柯勒瑪智能4(查看)由常州柯勒瑪智能裝備有限公司提供。常州柯勒瑪智能裝備有限公司是江蘇 常州 ,工業(yè)自動控制系統(tǒng)及裝備的見證者,多年來,公司貫徹執(zhí)行科學(xué)管理、創(chuàng)新發(fā)展、誠實守信的方針,滿足客戶需求。在常州柯勒瑪領(lǐng)導(dǎo)攜全體員工熱情歡迎各界人士垂詢洽談,共創(chuàng)常州柯勒瑪更加美好的未來。商") 稱重包裝機-蘇州任我
稱重包裝機-蘇州任我
電議
-汽車零部件焊接機器人-江西機器人") 常州柯勒瑪 (圖)-汽車
常州柯勒瑪 (圖)-汽車
電議
準(zhǔn)蕙志機械(圖)-自動化設(shè)備廠家-南京自動化設(shè)備") 認(rèn)準(zhǔn)蕙志機械(圖)-自
認(rèn)準(zhǔn)蕙志機械(圖)-自
電議
指導(dǎo)-福州分切機廠家哪家好") 索岸膠帶機廠技術(shù)指導(dǎo)
索岸膠帶機廠技術(shù)指導(dǎo)
電議
 高速噴膠-日成精密儀
高速噴膠-日成精密儀
電議
還沒找到您需要的工業(yè)自動控制系統(tǒng)及裝備產(chǎn)品?立即發(fā)布您的求購意向,讓工業(yè)自動控制系統(tǒng)及裝備供應(yīng)單位主動與您聯(lián)系!
立即發(fā)布求購意向本網(wǎng)頁所展示的有關(guān)【全自動焊接機器人-焊接機器人- 常州柯勒瑪智能4(查看)_工業(yè)自動控制系統(tǒng)及裝備_常州柯勒瑪智能裝備有限公司】的信息/圖片/參數(shù)等由簡塑模機網(wǎng)的會員【常州柯勒瑪智能裝備有限公司】提供,由簡塑模機網(wǎng)會員【常州柯勒瑪智能裝備有限公司】自行對信息/圖片/參數(shù)等的真實性、準(zhǔn)確性和合法性負(fù)責(zé),本平臺(本網(wǎng)站)僅提供展示服務(wù),請謹(jǐn)慎交易,因交易而產(chǎn)生的法律關(guān)系及法律糾紛由您自行協(xié)商解決,本平臺(本網(wǎng)站)對此不承擔(dān)任何責(zé)任。您在本網(wǎng)頁可以瀏覽【全自動焊接機器人-焊接機器人- 常州柯勒瑪智能4(查看)_工業(yè)自動控制系統(tǒng)及裝備_常州柯勒瑪智能裝備有限公司】有關(guān)的信息/圖片/價格等及提供【全自動焊接機器人-焊接機器人- 常州柯勒瑪智能4(查看)_工業(yè)自動控制系統(tǒng)及裝備_常州柯勒瑪智能裝備有限公司】的商家公司簡介、聯(lián)系方式等信息。
在您的合法權(quán)益受到侵害時,歡迎您向luomei@zhixunsh.com郵箱發(fā)送郵件,或者進入《網(wǎng)站意見反饋》了解投訴處理流程,我們將竭誠為您服務(wù),感謝您對簡塑模機網(wǎng)的關(guān)注與支持!

電議元
價格具有時效性
①保存圖片到相冊
②打開微信掃一掃


![]() 18221259202
18221259202




 生成海報
生成海報











備-檢測設(shè)備,瑞科")
檢測設(shè)備-黑龍江固定電容器視覺檢測設(shè)備")
備可接糊盒機-膠裝龍在線錯頁錯貼檢測")

備-懷化涂裝設(shè)備-叁崎涂裝噴漆生產(chǎn)線(查看)")